


三維激光掃描技術(shù)在地質(zhì)災(zāi)害調(diào)查中的應(yīng)用
三維激光掃描技術(shù)是近幾年發(fā)展起來的一種新興測繪技術(shù),該技術(shù)已廣泛應(yīng)用于工程建設(shè)與物體三維測量等測繪及相關(guān)領(lǐng)域,具有高效率、高精度的獨(dú)特優(yōu)勢。本文在介紹三維激光掃描儀的工作原理的基礎(chǔ)上,以邢臺(tái)峽谷群地質(zhì)災(zāi)害調(diào)查為應(yīng)用研究對(duì)象。為了更夠在地質(zhì)災(zāi)害發(fā)生前,對(duì)地質(zhì)敏感區(qū)域進(jìn)行很好的預(yù)警工作。利用三維激光掃描設(shè)備能夠快速獲取現(xiàn)場高精度三維數(shù)據(jù),結(jié)合三維激光處理軟件,生成相對(duì)應(yīng)的地質(zhì)剖面圖、局部細(xì)節(jié)尺寸等信息,對(duì)應(yīng)急災(zāi)害提供精準(zhǔn)可靠的基礎(chǔ)數(shù)據(jù)。
三維激光掃描原理與方法
1.三維激光掃描儀基本原理
三維激光掃描儀的工作過程,實(shí)際上就是一個(gè)不斷重復(fù)的數(shù)據(jù)采集和處理過程,它通過具有一定分辨率的空間點(diǎn)(坐標(biāo)x,y,z,其坐標(biāo)系是一個(gè)與掃描儀設(shè)置位置和掃描姿態(tài)有關(guān)的儀器坐標(biāo)系)所組成的點(diǎn)云圖來表達(dá)系統(tǒng)對(duì)目標(biāo)物體表面的采樣結(jié)果。三維激光掃描技術(shù)是將實(shí)體的三維復(fù)雜信息通過激光的捕獲形成帶有屬性信息的實(shí)體三維點(diǎn)云模型,通過高速激光的掃描測量,獲取目標(biāo)的點(diǎn)、線、面、體、空間等三維實(shí)測數(shù)據(jù)進(jìn)行高精度三維逆向建模,又稱實(shí)景復(fù)制技術(shù)。
2.數(shù)據(jù)處理方法
為了能夠得到好的三維點(diǎn)云數(shù)據(jù)需要對(duì)采集的原始數(shù)據(jù)進(jìn)行處理,數(shù)據(jù)處理通常包括各測站點(diǎn)云數(shù)據(jù)拼接配準(zhǔn)、數(shù)據(jù)去噪和坐標(biāo)轉(zhuǎn)換等操作,數(shù)據(jù)拼接通過有多種方法,無目標(biāo)拼接、有目標(biāo)拼接以及采集過程實(shí)時(shí)自動(dòng)處理拼接。
三維激光掃描儀數(shù)據(jù)采集及點(diǎn)云處理
1.項(xiàng)目概況
河北邢臺(tái)峽谷群國家地質(zhì)公園1:1萬地質(zhì)災(zāi)害詳細(xì)調(diào)查的測量工作,是依據(jù)邢臺(tái)市國土資源局組織專家評(píng)審的《河北邢臺(tái)峽谷群國家地質(zhì)公園1:1萬地質(zhì)災(zāi)害詳細(xì)調(diào)查設(shè)計(jì)書》開展工作的。測繪主要工作內(nèi)容為:①1:200剖面測量;②1:500剖面測量;③1:200立面測量。其中地質(zhì)剖面測量和立面測量工作主要是通過三維激光掃描設(shè)備進(jìn)行數(shù)據(jù)的采集和處理,從而提交相應(yīng)的符合精度要求的成果數(shù)據(jù)及報(bào)告。
本項(xiàng)目采用Trimble SX10三維激光掃描儀完成大量測量工作,由于三維激光掃描需要將三維激光掃描儀獨(dú)立坐標(biāo)系統(tǒng)引入到當(dāng)?shù)亟^對(duì)坐標(biāo)系統(tǒng)中,所以本項(xiàng)目在每個(gè)地質(zhì)災(zāi)害點(diǎn)布設(shè)圖根點(diǎn)1個(gè),圖根點(diǎn)采用河北省衛(wèi)星定位綜合服務(wù)系統(tǒng)(HBCORS)。
2.設(shè)備投入
Trimble R8 GNSS接收機(jī)3套,Trimble SX10掃描機(jī)器人1臺(tái),配套電子手簿、計(jì)算機(jī)等硬件及Trimble Business Center (以下簡稱:TBC)、Trimble RealWorks、Office等軟件。
3.外業(yè)數(shù)據(jù)采集
三維激光掃描技術(shù)相對(duì)于傳統(tǒng)數(shù)據(jù)采集方式具有更高精度、遠(yuǎn)距離獲取等優(yōu)勢。本項(xiàng)目利用三維激光掃描技術(shù)進(jìn)行地質(zhì)點(diǎn)三維點(diǎn)云數(shù)據(jù)的采集以及獲取,結(jié)合生成的地質(zhì)剖面模型進(jìn)行了地質(zhì)點(diǎn)處地質(zhì)剖面和立面測量工作。首先,根據(jù)各地質(zhì)災(zāi)害點(diǎn)的區(qū)域大小、位置等情況,規(guī)劃掃描站數(shù)和需要測量的特征點(diǎn),利用天寶SX10進(jìn)行數(shù)據(jù)的掃描,采集點(diǎn)云數(shù)據(jù)和全站儀特征點(diǎn)數(shù)據(jù),內(nèi)業(yè)主要利用TBC、Trimble RealWorks軟件處理點(diǎn)云數(shù)據(jù),生成相應(yīng)地質(zhì)災(zāi)害點(diǎn)的剖面線和立面圖等成果。
點(diǎn)云數(shù)據(jù)的采集分為準(zhǔn)備工作和掃描兩個(gè)階段。準(zhǔn)備工作主要是對(duì)現(xiàn)場進(jìn)行踏勘,了解現(xiàn)場的具體環(huán)境,找出實(shí)地環(huán)境比較開闊而地方進(jìn)行測站位置的選取,測站位置必須保證以最少的測站數(shù)獲取所有的目標(biāo)數(shù)據(jù),根據(jù)測站位置以及每一站的掃描范圍來決定整體工作流程,每個(gè)測站利用已知控制點(diǎn)進(jìn)行定向工作,使用SX10設(shè)計(jì)測站,掃描所需要的點(diǎn)云,再利用SX10全站儀功能測量一些特征點(diǎn),這些特征點(diǎn)可以用來檢核點(diǎn)云精度。SX10三維激光掃描儀最大掃描測程可以達(dá)到600米范圍,掃描速度高達(dá)每秒26600個(gè)點(diǎn),激光光斑尺寸100米處僅14毫米,最高掃描精度1mm,測角精度可以達(dá)到1″。
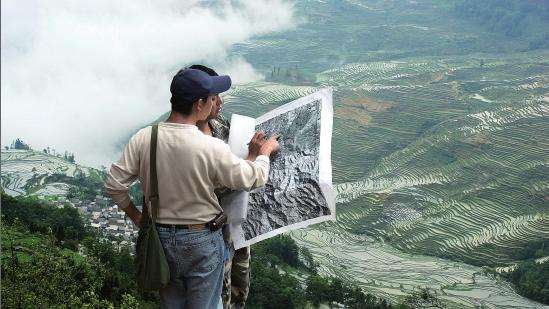
數(shù)據(jù)采集現(xiàn)場")
外業(yè)數(shù)據(jù)采集現(xiàn)場
4.點(diǎn)云數(shù)據(jù)處理及分析
點(diǎn)云數(shù)據(jù)分析:由于地質(zhì)環(huán)境周圍的植被或人工建筑物以及天氣影像,點(diǎn)云數(shù)據(jù)存在少量系統(tǒng)誤差和噪聲,不能直接使用且點(diǎn)云數(shù)據(jù)量大,會(huì)消耗巨大的存儲(chǔ)空間,因此需要對(duì)點(diǎn)云數(shù)據(jù)分析,判定點(diǎn)云是否存在未掃描的部位,若存在缺失部分,需要進(jìn)行重新掃描,如果數(shù)據(jù)存在較小的空洞,即可進(jìn)行補(bǔ)洞處理。
云")
在TBC中加載后的原始三維點(diǎn)云
點(diǎn)云數(shù)據(jù)去噪處理:在三維幾何模型中,特征和噪聲往往具有一些類似的幾何屬性為了將噪聲與特征區(qū)分開來,將不連續(xù)、變化大的點(diǎn)云數(shù)據(jù)看作噪聲,而將連續(xù)的起伏小的點(diǎn)云視為特征信息。理論上想要達(dá)到的去噪效果是在去除噪聲的同時(shí)盡可能保留點(diǎn)云數(shù)據(jù)的特征信息,但在點(diǎn)云數(shù)據(jù)的實(shí)際處理過程中,不僅僅需要去噪,還需要對(duì)模型的表面進(jìn)行重新構(gòu)建,使模型表面的曲面保持連續(xù)性。本項(xiàng)目根據(jù)點(diǎn)云數(shù)據(jù)情況,采用雙邊濾波算法進(jìn)行點(diǎn)云去噪,通過將點(diǎn)云數(shù)據(jù)利用TBC導(dǎo)出LAS格式后導(dǎo)入Trimble Real Works中進(jìn)行點(diǎn)云處理,Trimble RealWorks是專業(yè)的激光點(diǎn)云處理軟件,具有方便快捷的點(diǎn)云處理功能。
點(diǎn)云數(shù)據(jù)簡化:點(diǎn)云數(shù)據(jù)具有海量數(shù)據(jù)的特點(diǎn),其采集原理是以所需精度為間隔進(jìn)行點(diǎn)云數(shù)據(jù)采集,這也造成了在地質(zhì)剖面上曲率較小的位置點(diǎn)云數(shù)據(jù)冗余的現(xiàn)象,因此需要對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行簡化。本項(xiàng)目采用曲率采樣的方式進(jìn)行簡化,其主要思想為: 盡量保留曲率大的區(qū)域的點(diǎn)云數(shù)據(jù),以保證點(diǎn)云的細(xì)節(jié)特征,利用Trimble RealWorks具有的獨(dú)特算法通過減少曲率小的區(qū)域的點(diǎn)云數(shù)據(jù)的方式來減少數(shù)據(jù)冗余。
曲率大的區(qū)域進(jìn)行點(diǎn)云處理")
Realworks對(duì)曲率大的區(qū)域進(jìn)行點(diǎn)云處理
表面模型生成:數(shù)據(jù)導(dǎo)入TBC可得到點(diǎn)云數(shù)據(jù),利用Trimble RealWorks軟件自動(dòng)分類地面、建筑物、電線桿和標(biāo)志、高植被。軟件可以通過對(duì)應(yīng)的算法剔除周圍的雜點(diǎn),根據(jù)效果抽稀點(diǎn)云。在剔除植被、地物等非地貌部分點(diǎn)云數(shù)的基礎(chǔ)上,利用Trimble RealWorks基于點(diǎn)云數(shù)據(jù)生成三維模型,并對(duì)有問題的部分進(jìn)行修改編輯。
數(shù)據(jù)成果生成:在Trimble RealWorks軟件中,根據(jù)實(shí)際項(xiàng)目需求,進(jìn)行相應(yīng)位置和區(qū)域的地質(zhì)剖面線和立面圖的生成,并可根據(jù)現(xiàn)場已有控制點(diǎn),或利用SX10 全站儀功能測量的特征點(diǎn)進(jìn)行相應(yīng)誤差檢核工作。Trimble RealWorks數(shù)據(jù)處理軟件可以將剖面線、立面圖數(shù)據(jù)導(dǎo)出為CAD(DXF/DWG)、GIS(SHP) 等格式的數(shù)據(jù)成果。
處理好的點(diǎn)云數(shù)據(jù)進(jìn)行剖面切割")
對(duì)處理好的點(diǎn)云數(shù)據(jù)進(jìn)行剖面切割
測量過程中出現(xiàn)的技術(shù)問題及處理情況
由于項(xiàng)目區(qū)域位于都位于山區(qū),測量時(shí)間為初夏,山區(qū)存在很多樹木、草叢等植被,SX10外業(yè)掃描時(shí)也會(huì)把這些植被掃描進(jìn)行來,這就需要內(nèi)業(yè)處理時(shí)剔除這些植被和草叢數(shù)據(jù),否則會(huì)影響剖面線和立面圖等數(shù)據(jù)成果的精度。SX10后處理軟件采用Trimble TBC、Trimble RealWorks軟件,該軟件具有點(diǎn)云自動(dòng)分類功能,可以在剔除植被、雜點(diǎn)、噪點(diǎn)之后在進(jìn)行相應(yīng)數(shù)據(jù)成果的生成,并進(jìn)行相應(yīng)的數(shù)據(jù)成果精度檢驗(yàn)。
結(jié)語
本項(xiàng)目通過利用三維激光掃描技術(shù)獲取到地質(zhì)區(qū)域的高密度、高精度的三維點(diǎn)云數(shù)據(jù),對(duì)與處理好的三維點(diǎn)云進(jìn)行特征提取,精確獲得整個(gè)坡體地面現(xiàn)狀,通過對(duì)典型區(qū)域進(jìn)行處理分析,進(jìn)行地質(zhì)災(zāi)害嚴(yán)重性的預(yù)判和應(yīng)急處理。三維激光掃描技術(shù)具有絕對(duì)的先進(jìn)技術(shù)優(yōu)勢和應(yīng)用潛力,這種數(shù)據(jù)獲取方法具有無需事先埋設(shè)監(jiān)測設(shè)備、非接觸測量、作業(yè)速度快、測量精度高,能夠及時(shí)的反應(yīng)地質(zhì)災(zāi)害隱患區(qū)域的總體形態(tài),比較適合大型地質(zhì)災(zāi)害監(jiān)測,具有一定的現(xiàn)實(shí)意義和應(yīng)用價(jià)值。
更多相關(guān)

測繪資質(zhì)要換證,按需付費(fèi)更劃算
自然資源部辦公廳于6月28日正式發(fā)布《自然資源部辦公廳關(guān)于印發(fā)測繪資質(zhì)管理辦法和測繪資質(zhì)分類分級(jí)標(biāo)準(zhǔn)的通知》。《通知》要求,2021年7月1日至12月31日,對(duì)目前已經(jīng)取得測繪資質(zhì)證書的測繪單位依...

徠卡TZ05全站儀拱壩弦長觀測,賦能水電大壩防洪
南方強(qiáng)降雨帶一直持續(xù),中央氣象臺(tái)連續(xù)41天發(fā)布暴雨預(yù)警,為2007年氣象災(zāi)害預(yù)警信息發(fā)布制度建立以來時(shí)間最長。長江中下游流域降雨量498.5毫米,較常年同期偏多64.3%,為1961年以來歷史同期...
盤點(diǎn)2018:十大關(guān)鍵詞回顧測繪地理信息行業(yè)
站在測繪地理信息行業(yè)的整個(gè)發(fā)展歷史角度來看,2018,這是一個(gè)值得整個(gè)行業(yè)銘記的時(shí)間節(jié)點(diǎn)。 下面我們通過十個(gè)關(guān)鍵詞來重新梳理下2018年勘測行業(yè)的發(fā)展脈絡(luò),同時(shí)也回顧下整個(gè)2018各自的工作足跡...

DJI 大疆發(fā)布Mavic 3 Classic旗艦影像點(diǎn)亮創(chuàng)作靈感
DJI大疆正式發(fā)布DJIMavic3Classic,以旗艦影像點(diǎn)亮創(chuàng)作靈感,聚焦大作光彩。Mavic3Classic以其在影像素質(zhì)、飛行性能、智能功能等多方位的出色表現(xiàn)...

徠卡BLK2GO三維激光掃描儀:重新定義移動(dòng)掃描
徠卡BLK2GO三維激光掃描儀:重新定義移動(dòng)掃描技術(shù)革命性的移動(dòng)掃描解決方案在當(dāng)今快速發(fā)展的三維數(shù)字化領(lǐng)域,徠卡測量系統(tǒng)公司推出的BLK2GO三維激光掃描儀代表了移動(dòng)掃描技術(shù)的一次重大飛躍。這款設(shè)備徹...

徠卡助力冬奧 3D壓雪讓場地更精準(zhǔn) 更高效 更智能
萬眾矚目的2022北京冬奧會(huì)即將開幕,各國運(yùn)動(dòng)員將在這里進(jìn)行精彩絕倫的表演,展現(xiàn)自己的精彩。其中云頂滑雪公園賽場,有自由式滑雪空中技巧、雪上技巧、U型場地、坡面障礙技巧、單板平行大回轉(zhuǎn)、障礙追逐6...

使用全站儀的10大常見問題及解決方法
全站儀作為測量儀器,使用過程中可能會(huì)遇到一些常見的問題。南京環(huán)球測繪為您詳解使用全站儀時(shí)可能出現(xiàn)的十大問題及其解決方法:1.**對(duì)中問題**:儀器未能精確對(duì)準(zhǔn)目標(biāo)。-解決方法:檢查腳架是否穩(wěn)定,調(diào)...

移動(dòng)測繪 | 車載移動(dòng)測繪照進(jìn)實(shí)景三維現(xiàn)實(shí)
LeighSurveyors公司總部位于澳大利亞布里斯班,專注于交通基礎(chǔ)設(shè)施市場。該公司通過持續(xù)對(duì)激光雷達(dá)、掃描機(jī)器人以及對(duì)最新移動(dòng)測繪技術(shù)的投資,提供更全面、更精確的解決方案,保持著行業(yè)領(lǐng)先地位,...
 環(huán)球測繪微信
環(huán)球測繪微信